Repo:https://github.com/z2010012286/T-Robot
0 Open source motivation
- Learned ROS and micro-ROS on and off for about 1 year and always wanted to do something
- Rising Sun x3 PI +ROS2 has a lot of interesting things that need a platform to achieve
- ** There seems to be no open source mobile robot project using Micro-ROS at the bottom in China (if there is, please ignore…) **
1 Robot hardware part
** are Taobao procurement, in order to avoid advertising suspicion, do not put links ~**
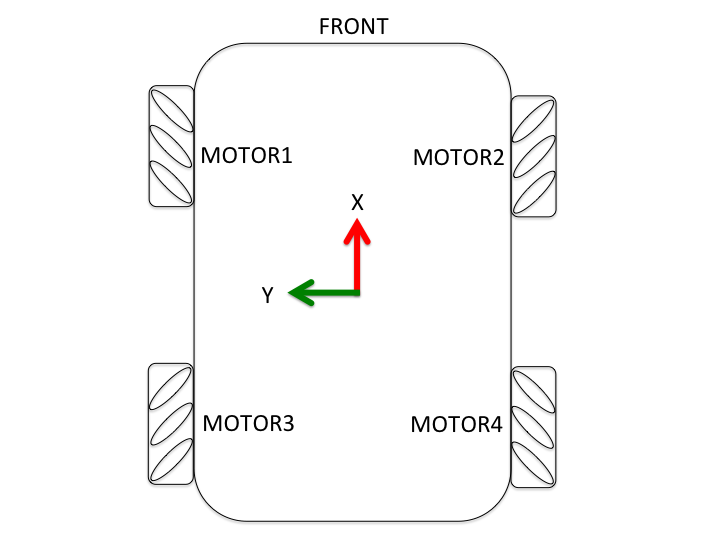
- ** Robot chassis layout **
- ** Main control ** : esp32 (ESP-WROOM-32)+** Rising Sun x3 Pie **(2GB)
- ** LiDAR ** : LD14
- IMU : MPU9250
- ** Motor ** : WGA12-N20 DC motor (12V, 1:50 reduction ratio)
- ** Motor drive chip ** : 4 RZ7889
- ** Encoder ** : AB dual phase incremental magnetic Hall encoder
- ** Power Supply: 12V lithium battery; -12V drive motor; External 12V to 5V module provides DC-5V output (maximum current 4A);
- ** Wheels ** : 4 wheat wheels, diameter 48mm
- ** Structural parts ** : Cut acrylic sheet, 3D printing
2 Underlying firmware part (core)
2.1 lib/config
Contains most macro definitions, pin definitions, etc.
2.2 lib/encoder
Encapsulation of c + + library is suitable for esp32 encoder, the original author warehouse address: [ESP32encoder] (https://github.com/madhephaestus/ESP32Encoder.git)
- This project has made necessary modifications to it, adding the ‘getRPM()’ function to directly obtain the speed information.
```c++ float ESP32Encoder::getRPM(int counts_per_rev) //counts_per_rev: Count of encoders per revolution { counts_per_rev_ = counts_per_rev; int64_t encoder_ticks = getCount(); // this function calculates the motor’s RPM based on encoder ticks and delta time unsigned long current_time = micros(); unsigned long dt = current_time - prev_update_time_; // convert the time from milliseconds to minutes double dtm = (double)dt / 60000000; double delta_ticks = encoder_ticks - prev_encoder_ticks_; // calculate wheel’s speed (RPM) prev_update_time_ = current_time; prev_encoder_ticks_ = encoder_ticks; return ((delta_ticks / counts_per_rev_) / dtm); } `
- Configurable for different encoder counting modes:
```c++ //file: ESP32encoder.h void attachSingleEdge(int aPintNumber, int bPinNumber); // 1x void attachHalfQuad(int aPintNumber, int bPinNumber); // 2x void attachFullQuad(int aPintNumber, int bPinNumber); //4 times `
2.3 lib/imu
imu_interface.h- Defines the ‘ros2 imu message’ format of imu, which can be sent directly to ROS/ROS2 for use;
- ‘IMUInterface()’ constructor initializes’ imu_msg.header 'related information, different versions of the writing slightly different;
- Abstract 4 virtual functions, easy to adapt to different types of IMUs;
```c++ //file: imu_interface.h virtual geometry_msgs__msg__Vector3 readAccelerometer() = 0; virtual geometry_msgs__msg__Vector3 readGyroscope() = 0; virtual bool startSensor() = 0; virtual void calibrateGyro()=0; `
default_imu.h- rely on MPU9250 library (https://github.com/hideakitai/MPU9250.git), the library can be platformio. Ini file for automatic installation, also can be downloaded manually add;
- Implementation of 4 virtual functions in ‘imu_interface.h’;
2.4 lib/kinematics
c++ package for solving the car chassis forward and inverse kinematics library. Suitable for two-round difference, Ackermann, wheat wheel, etc. The library of the original address: [kinematics] (https://github.com/linorobot/linorobot2_hardware/tree/galactic/firmware/lib/kinematics) Car wheel base, wheel diameter, speed and other information are defined in ‘lib/config’;
- Core function 1: Calculate the wheel speed of the car from the linear speed and angular speed
```c++ rpm getRPM(float linear_x, float linear_y, float angular_z); `
- Core function 2: linear speed and angular speed are calculated from the wheel speed of the trolley
```c++ velocities getVelocities(int rpm1, int rpm2, int rpm3, int rpm4); `
2.5 lib/motor
‘motor_interface.h’ abstracts the various functions of the motor, such as forward rotation, reverse, stop, etc. ‘motor.h’ inherits’ motor_interface ‘and implements its various functions, and adds’ pwm_offset’; ‘pwm_offset’ is to solve the problem that some motors do not rotate under low duty ratio pwm drive;
2.6 lib/odemetry
The odometer ‘nav_msgs/msg/odometry’ is defined to publish the ‘odometry message’;
- Core function 1: Gets the current odometry message data
```c++ nav_msgs__msg__Odometry Odometry::getData() { return odom_msg_; } `
- Core function 2: passes the speed information and updates the odometry message data
```c++ void update(float vel_dt, float linear_vel_x, float linear_vel_y, float angular_vel_z); `
2.7 lib/pid
As the name suggests, the PID control of the motor, not much to explain, look at the code ~ 2.8 lib/micro_ros_arduino Based on the official micro_ros_arduino#v2.0.5foxy, necessary modifications are made to it, and rebuild is carried out:
- Change UCLIENT_CUSTOM_TRANSPORT_MTU to 1024 to enable the best_effort transmission policy to transmit more than 512Bytes of data, mainly odometry message.
- Modify ‘RMW_UXRCE_MAX_HISTORY=2’ to reduce RAM usage and avoid memory overflow;
- For details about the rebuild process, see https://github.com/micro-ROS/micro_ros_arduino/issues/1221#issuecomment-1329923473
2.9 src/main.cpp
- Initialize encoders, pid controls, motors, etc
- Create 2 publishers: odom and imu
- Create one subscriber: cmd_vel
- Create 3 software timers: 2 for publisher release; 1 for controlling the movement of the robot;
3 ROS2 feature pack
- robot_description: indicates the robot description file
- robot_bringup: starts the launch file, including lidar and micro_ros_agent
- robot_cartographer: indicates that cartographer creates maps
4 Follow-up
- Add camera to try more gameplay; There are a lot of interesting algorithms in the TROS of the x3 faction of the Rising Sun;
- Will update from time to time